
Salmonete Technologies se dedica a la arquitectura, diseño y desarrollo de firmwares para ROVs submarinos, especialmente dedicados a la adquisición, digestión, transformación, análisis y tratamiento de datos masivos.
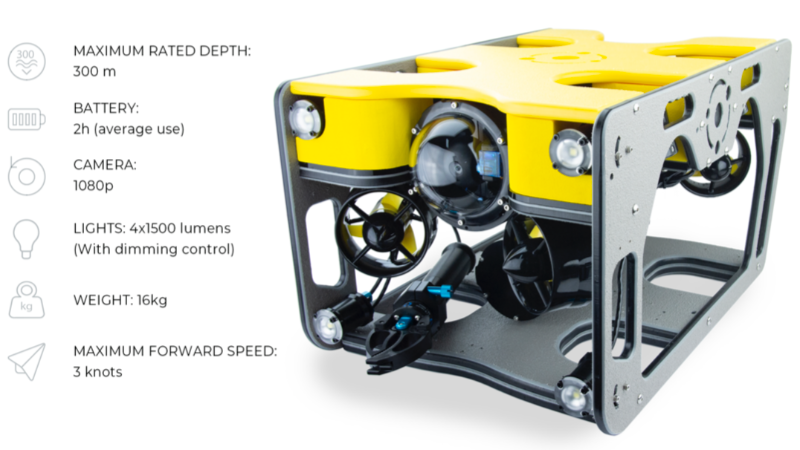
ROV
Es un vehículo submarino y no tripulado operado remotamente desde la superficie por un piloto cualificado. Los ROVs suelen estar equipados con motores, sensores de profundidad, giroscopios, cámaras y diversas herramientas de análisis, lo que les permite recopilar datos continuamente y ejecutar misiones bajo el agua de muy diversa índole. Los ROVs son empleados actualmente en todo tipo de industrias, habiendo logrado optimizar los procesos en muchas de ellas, siendo herramientas claves en el estudio del mar, mantenimiento de todo tipo de estructuras y embarcaciones.
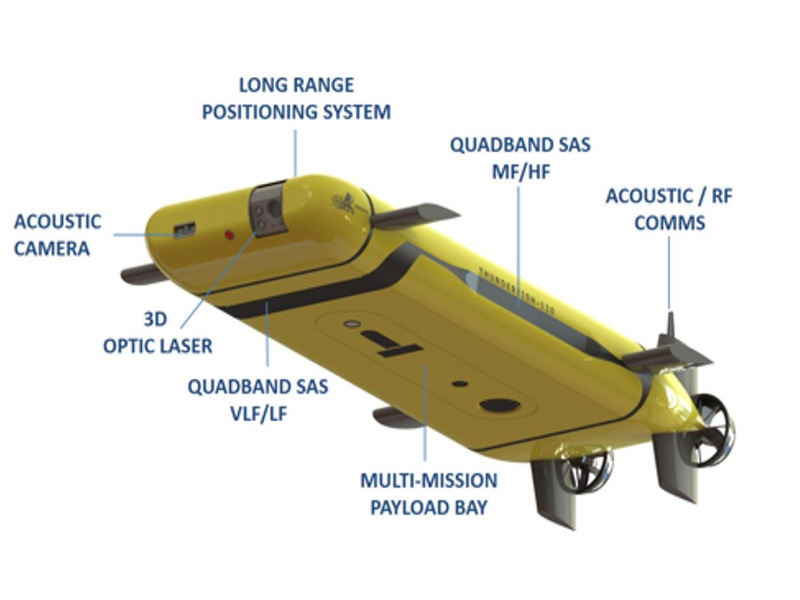
UAV
Es un vehículo submarino autónomo no tripulado que tiene uno o varios hitos que cumplir. Estos suelen ser inspección programada siguiendo un planning de trabajo, análisis y exploración de los diferentes entornos marinos. La diferencia con un ROV radica principalmente en su autonomía, es decir, operan sin la necesidad de un piloto externo que los comande y no necesitan estar conectados a un barco, por lo que no tienen umbilical y esto les ofrece aún mayor autonomía y capacidad operativa. Por el contrario, al ser independientes muchas de las ocasiones se dedicarán a su tarea sin más, no permitiendo el telecontrol en tiempo real al no poder comunicarse de forma efectiva grandes cantidades de información entre la base de operaciones y el UAV bajo el agua.
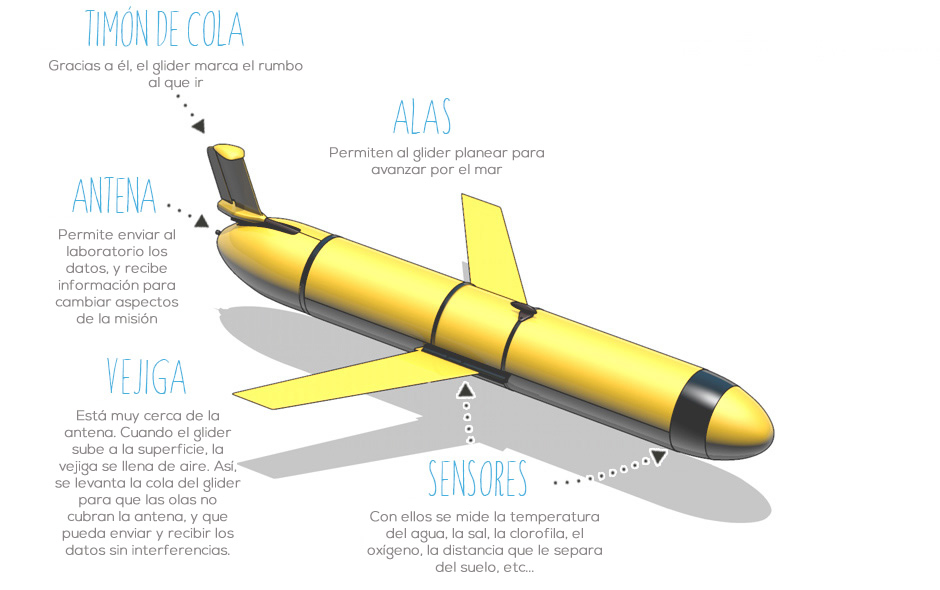
Glider
También llamado planeador, es un tipo de UAV que por lo general no tiene propulsión propia y que funciona modificando su su forma para controlar la flotabilidad y permitiéndole alterar su centro de masa para permitirle aprovecharse de la propia dinámica del agua para conseguir trasladarse grandes distancias a un coste energético muy reducido. Son usados principalmente para estudiar grandes volúmenes de agua y operan alternande entre la superficie y las diferentes capas de agua hasta las profundidades.
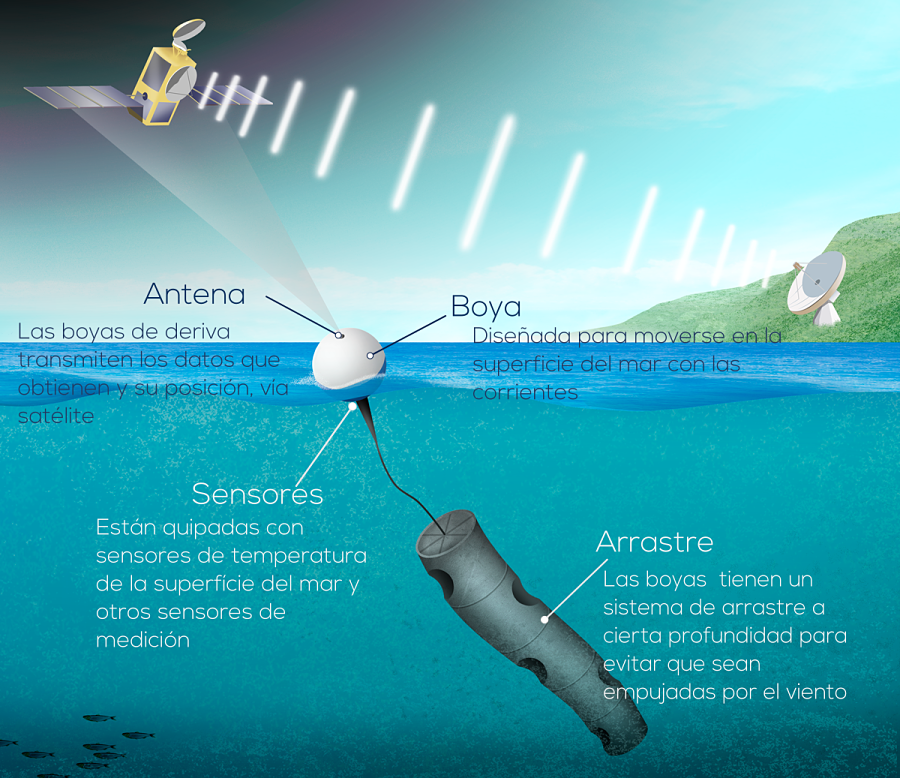
Boya de deriva
También llamada plataforma Lagrangiana. Este tipo de boyas son lanzadas al mar y se realiza un seguimiento de su movimiento a través de las corrientes superficiales. Gracias al posicionamiento GPS, mediante satélites, se conoce su localización lo que permite medir su trayectoria y velocidad. La información obtenida por este método es muy rica desde el punto de vista geográfico y permite construir mapas de de corrientes de la superficie terrestre así como conocer geográficamente la variabilidad de los diferentes valores medidos.
Software
Gracias a las orquestación de sistemas, programación multinivel y monitorización de flujos de trabajo mediante técnicas de dispersión de tareas, adquirimos datos de forma masiva. Estos son transformados para ajustarse a parámetros útiles en el estudio y son procesados para visualizarse en complejos sistemas de gráficas que permiten observar el funcionamiento normal de procesos que se estén llevando a cabo, así como adelantarse en la detección de anomalías, clave en cualquier sistema de prevención y planificación preferente.


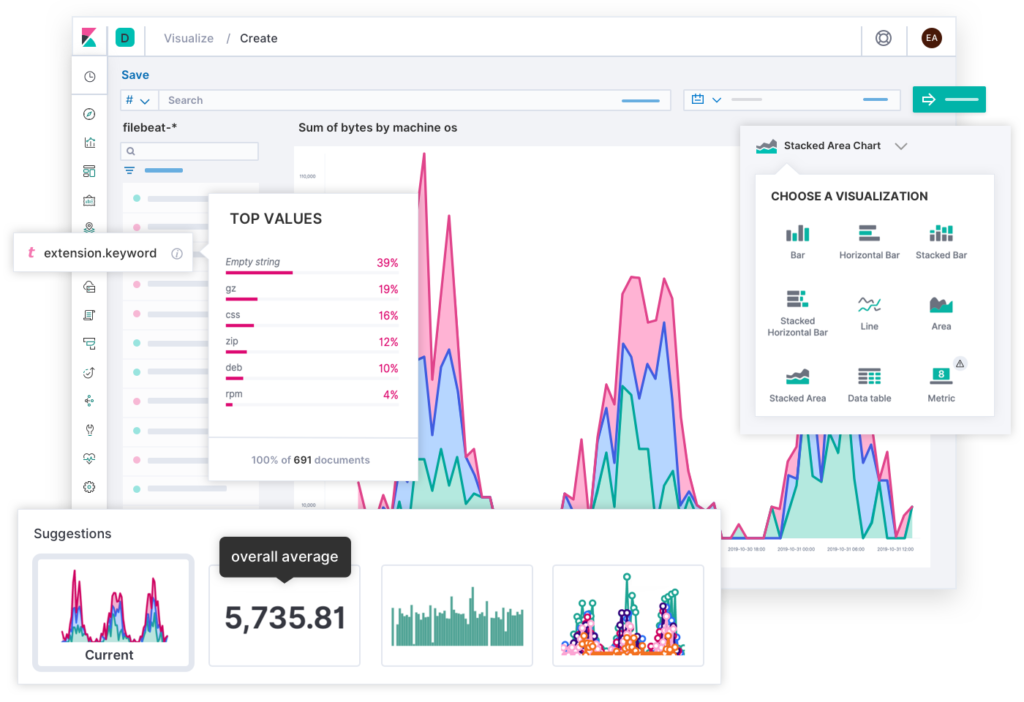
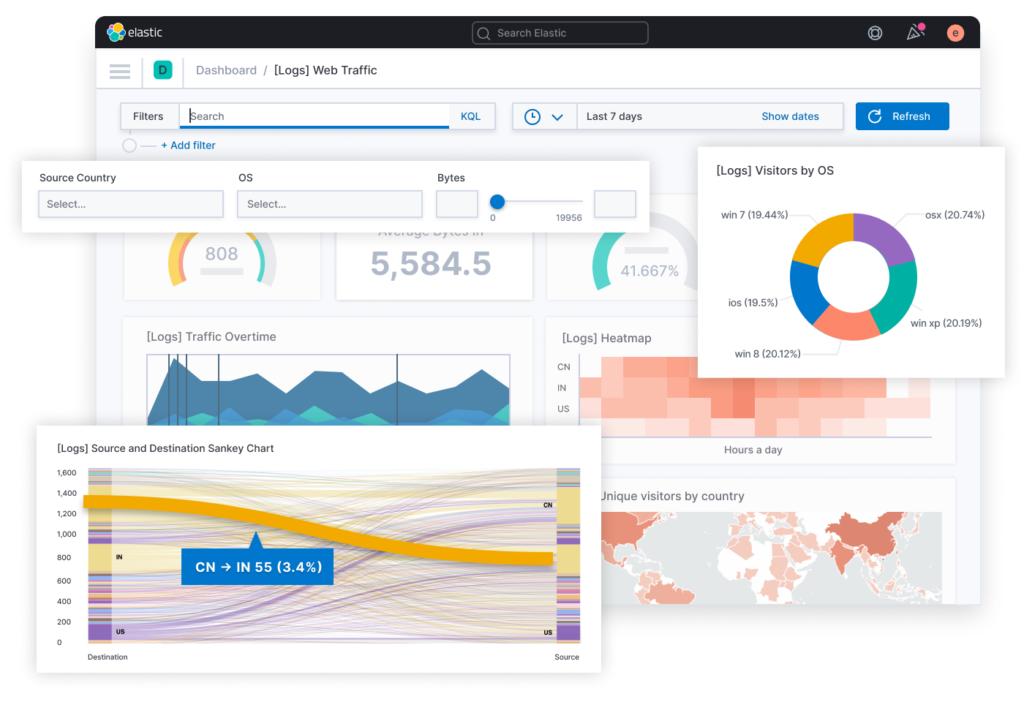
Con nuestras herramientas de visualización de datos de serie temporales a partir de un bloque de datos recolectados obtenemos un panorama gráfico de la situación de todo un sistema, ubicando las entidades más importantes y reconociendo patrones que aseguran un funcionamiento fiable. La enorme base de conocimientos sostenida por nuestros sistemas y que progresivamente va procesando los nuevos datos que vamos recibiendo, es gestionada en apenas unos segundos y, gracias a ello, es posible visualizar de manera representativa los datos estadísticos de una manera rápida y organizada.
¡Sal y descubre el mundo con Salmonete!